MiniBot
Three iterations of a 6×6×6 inch competition robot built to stack and flip glowing cubes in Cubic Chaos - a quantum-themed arena game. Finalist to back-to-back first place wins.
Cubic Chaos
The Challenge
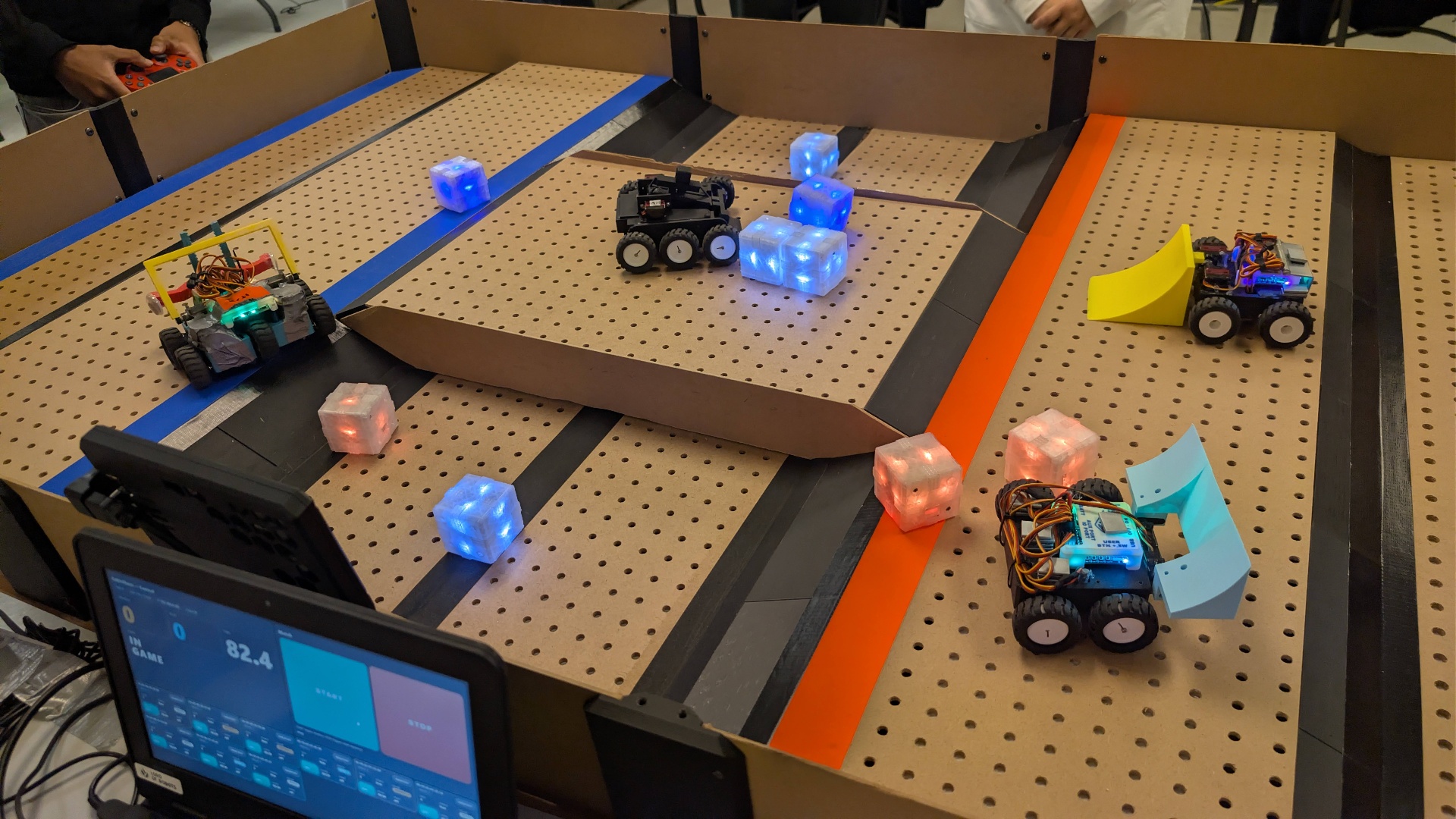
Cubic Chaos is set in a futuristic quantum arena where robots manipulate glowing cubes to score points. The twist: every robot has to fit inside a strict 6×6×6 inch cube at the start of the match.
Across three competitions I redesigned and rebuilt the robot from scratch each time - learning what worked, what didn't, and pushing the design further with every iteration.
Three robots, one goal
Each iteration kept what worked and rebuilt what didn't.
Robot Design 1
The mecanum prototype
First iteration focused on omnidirectional movement and a clean, compact build with all wiring tucked inside the drive base.
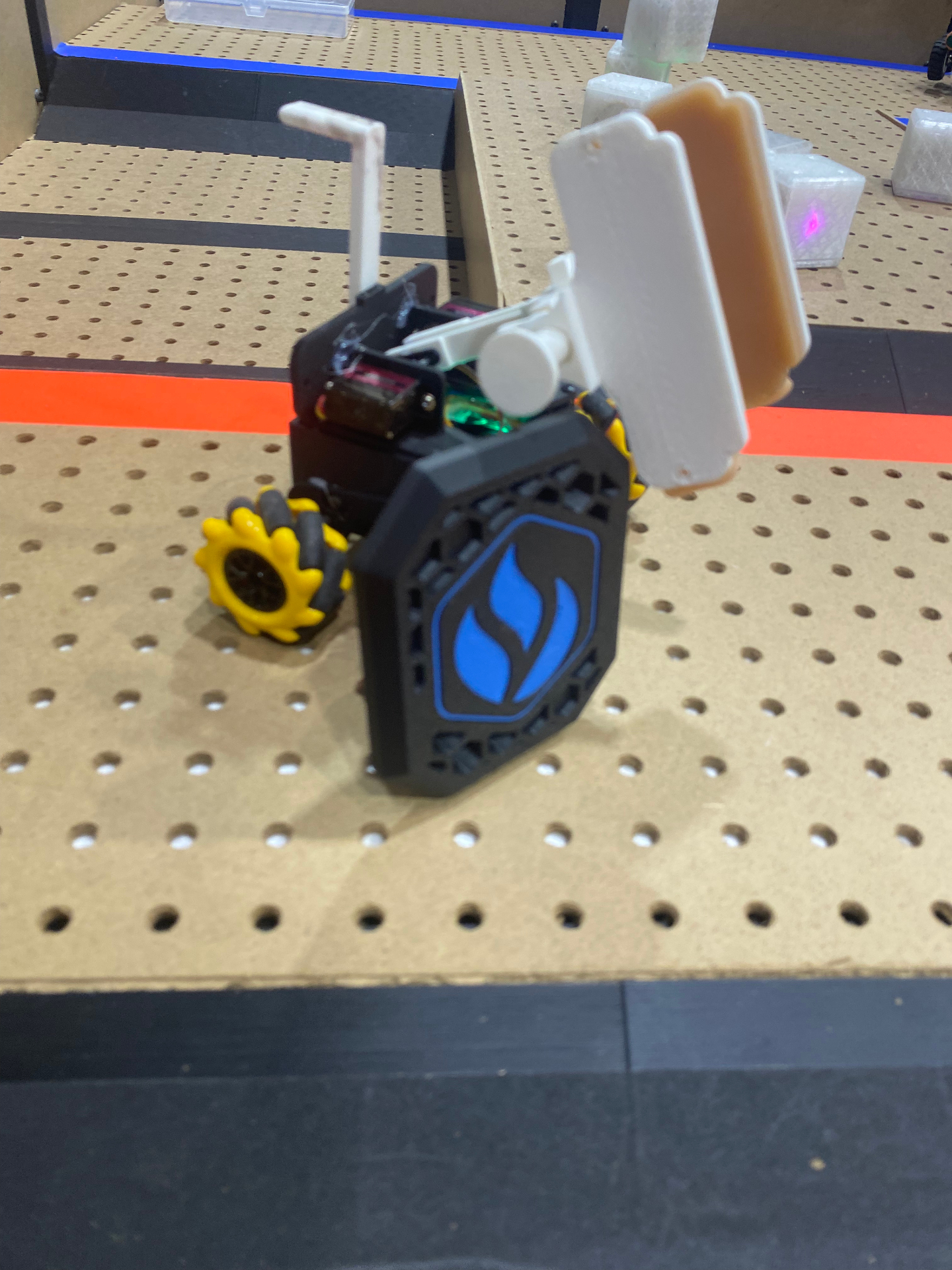
- Custom drive brackets keep wiring inside the chassis.
- Clamp-style gripper driven by a worm-geared N20 motor.
- Two servos handle arm positioning.
- PLA gripper lined with polyurethane flaps for grip.
Robot Design 2
Tank drive + flipper
Iteration two traded mecanum for tank drive to win stability, then added an aggressive front flipper to disrupt opposing stacks.
- Switched from mecanum to tank drive for stability under contact.
- Upgraded drive motors from 100 RPM to 300 RPM N20s.
- Slightly smaller base to reduce tipping moments.
- Front flipping mechanism added a new offensive tool.
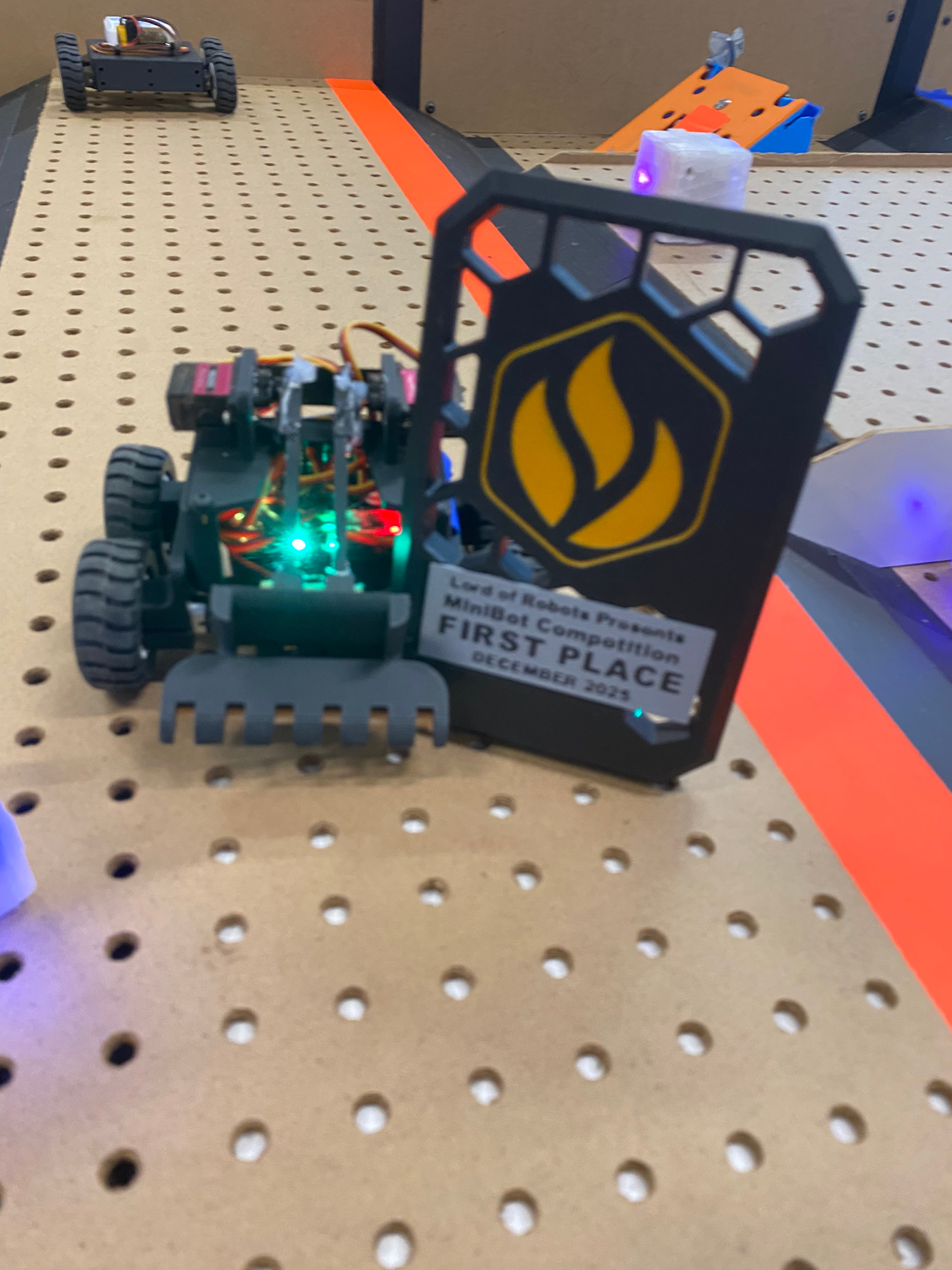
Final Robot Design
6-wheel pushing brick
The final build maximized pushing power and stability - flattest profile possible, 6-wheel drivetrain, and a flipper flush to the ground.

- 6-wheel drivetrain delivers significantly more pushing force.
- Profile dropped to the lowest possible to resist tipping.
- Flipper sits flush to the ground with a larger contact area.
- Drive train tuned to fit exactly within the 6×6 footprint.
What I learned across builds
- Stability beats speed - tank and 6-wheel drives won where mecanum couldn't.
- Lower profile = fewer tipping losses in contact play.
- Worm-geared grippers hold without burning out the motor.
- Iterating between competitions teaches more than perfecting one design.
- Wiring discipline inside the chassis is a real performance feature.
- Programming in C++ with a PS4 controller kept the driver in flow.
Tech & build summary
Mechanical parts were modeled in CAD and 3D printed in PLA, with polyurethane flaps added to grip surfaces. Drive electronics ran on N20 motors swapped between generations (100 → 300 RPM) and the firmware was written in C++ with a PS4 controller for live driving.